时间:2019-02-26
2月26日下午,在由上海保隆汽车科技股份有限公司(简称“保隆科技”)主办、上海芯仑光电科技有限公司(简称“芯仑科技”)和武汉大学合办,上海市松江区人民政府新闻办公室、松江区科学技术委员会指导的G60科创走廊“汽车动态视觉与雷达传感器”新闻发布会上,发布了保隆科技自主研发的全新汽车动态视觉与雷达传感器等系列产品,包括动态视觉传感器、77G及24G毫米波雷达、双目前视系统、红外热成像夜视仪、驾驶员预警系统、车用人脸识别系统等,这是人工智能在自动驾驶感知层上的融合应用,有助于汽车从辅助驾驶进化到自动驾驶、自主驾驶。

资料显示,全球汽车智能感知领域日益蓬勃,国内整车在该领域也在不断实现颠覆性技术创新,保隆科技在感知层传感器突破国外技术垄断,为中国汽车安全、智能、舒适发展开辟崭新道路
。
正如保隆科技董事长陈洪凌在致辞中所述,公司精准把握汽车智能化发展脉搏,确立了在智能和控制领域发力的汽车智能化战略,汽车电子单元总监李威带领团队致力做汽车的“眼睛”和“耳朵”。
团队集成芯仑科技的芯片技术和武汉大学的算法技术,研发的动态视觉传感器产品像素高(可达100万)、反应速度极快,能够有效过滤背景、提取信息,大大降低后端信号处理复杂度,能用少算力在感知层完成目标识别算法。它能够在大雾、强光、弱光等环境条件下快速清晰的显示图像并捕捉物体运动轨迹,是国际领先的视觉系统产品。
公司研发的77G及24G毫米波雷达在恶劣天气的穿透力强、体积小、测量精度高,能够实现汽车的盲点检测、车后横越交通警示、前车防撞等功能,帮助汽车安全、平稳运行。此两项技术为汽车未来实现的无人驾驶提供技术支撑。芯仑科技开发的动态视觉传感器芯片采用事件驱动原理,颠覆传统图像感知方式,图像处理的底层算法在感光芯片上就能实现,能够为图像处理直接提供去除冗余信息后的有用信号,从而大大降低后端信号处理的复杂度,帮助人工智能更快、更准、更省力地感知外部世界。武汉大学自主设计的基于深度学习的目标检测算法、场景超分辨率算法以及目标跟踪算法在提升目标识别、抗干扰、持续稳定的跟踪方面有突出表现,和保隆科技传感器结合,实现智能感知。
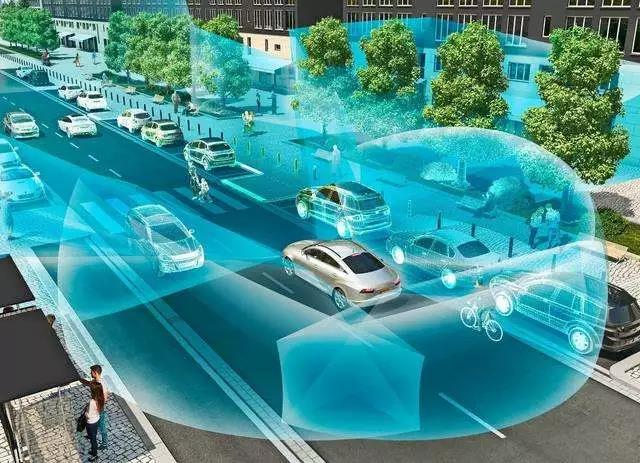
本次发布的一系列汽车动态视觉与雷达传感器在复杂的行车环境中能够实现汽车内部控制调整与外部感知预判,为实现更高级别辅助驾驶乃至无人驾驶提供技术支撑。除此以外,产品体积小、精度高、标注快速准确,契合市场对下一代汽车智能化升级的发展需求。